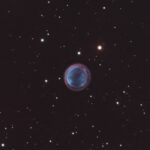
Första projektet då jag hade konverterat Dobsonteleskopet för Astrofoto
- Detta ämne har 4 svar, 2 deltagare, och uppdaterades senast 25-12-03 19:42 av
 .
.
Visar 3 svarstrådar
 Klassikern M82!
Klassikern M82!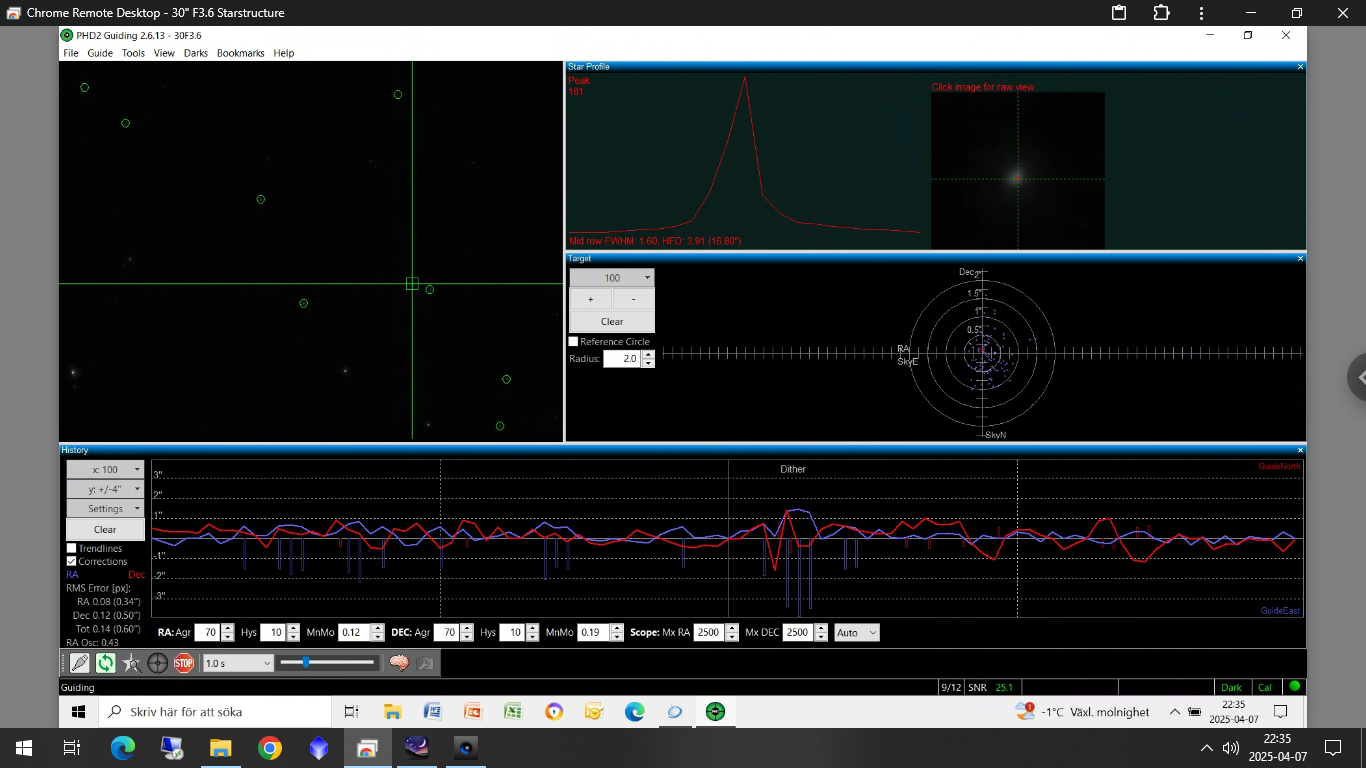
Visar 3 svarstrådar
- Du måste vara inloggad för att svara på detta ämne.
Senaste diskussionerna
Månadens bild i galleriet
-

- M31 Andromeda (Alex Linde Thomas Hansson)
Årets bild i galleriet
-

- C/2023 A3 (Tsuchinshan- ATLAS) (Andreas Holmström)
Senaste bilderna i forumet
-

- IC 410 Tadpole IC 417 Spider NGC 1931 Fly (Mårten Frosth)
-

- NGC 2841 (Peter Folkesson)
-

- NGC 1931 (Peter Folkesson)
-
- Abell 16 (Sven Eklund)

-

- Abell 6 (Sven Eklund)
-

- NGC 3726 (Gabriel Wiklund)
-

- Polaris (SDST)
 Senaste nytt från SAAF-webben
Senaste nytt från SAAF-webben
- Årsmöte i SAAF – 16 april 2026
- Vårhimlens pärlor – observationskafé med SAAF, 25 februari
- Leoträffen — ny observationsträff med SAAF, 10–11 april på Öland
- Årets första variabelmöte 12 mars – välkommen alla SAAF-medlemmar
- Värmland Star Party 2026
- Apertur blir SAAF:s nya medlemstidskrift!
- Telescopium nummer 4 2025 snart ute – 93:e och sista numret!
- Observationsbeställningar – nytt sätt att ta bilder med fjärrteleskopet
- Telescopium nr 3 2025 ute snart!
- Årsmöte 2025



